Machine Learning Articles of the Week: End to End Visual Motor System, Embracing the Hairball, Common Machine Learning Mistakes, AWS ML, and more.
This is the beginning of posts I plan to make producing short summaries of a sample of interesting semi-timely articles and papers.
End-to-End Training of Deep Visuomotor Policies
Policy search with neural networks has classically been a difficult problem due to often being non-differentiable and with a high dimensional state space that makes reinforcement learning difficult in terms of numerical stability and quantity of training data. The authors created a policy search method that performs well with partially observed state inferred from image data and high dimensional policy spaces. It only requires “minutes” of observational data to train motor control policies. The end to end visual motor control system is implemented in a 7 layer convolutional neural network with 92000 parameters.
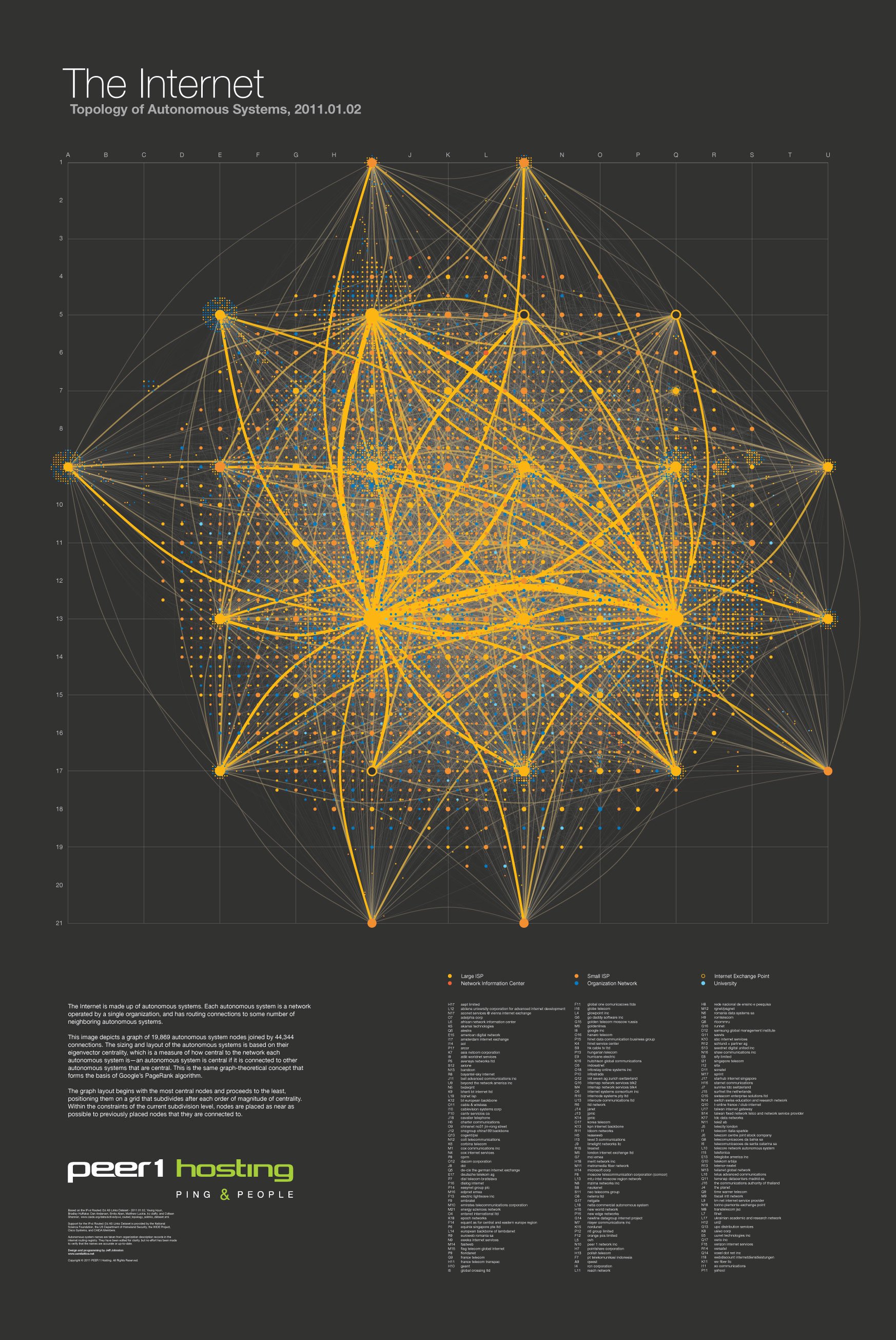
Embracing the Hairball
Densely connected graphs create hairballs. This approach produces an aesthetically pleasing deterministic plot of the nodes and edges using subdividing grids.
7 Common Machine Learning Mistakes
Quick read on some common machine learning mistakes such as: using a loss function that doesnt incorporate business goals, linear model with non-linear data, using regularization without normalizing feature ranges, and interpreting the absolute value of coefficients from linear or logistic regression as feature importance.
What to Do When People Draw Different Conclusions From the Same Data
Humans have biases. These get encoded into models and experiments. If having unbiased analysis is important, it may be useful to internally have multiple people working independently to provide confidence in conclusions.
Amazon Machine Learning
Amazon releases machine learning as a service model on top of logistic regression. While implementation details are scarce, it is likely inspired by work at Yahoo with Vowpal Rabbit and Google with Sibyl.